サーボシステムの種類
位置サーボシステム
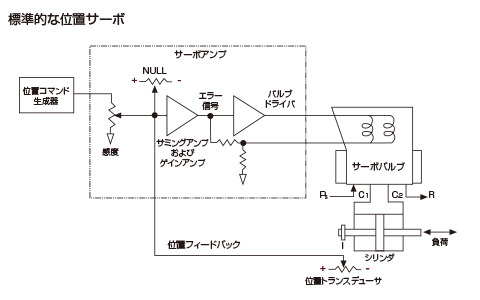
位置サーボシステムは、パイロット駆動または直動サーボバルブ、アクチュエータ、位置フィードバックトランスデューサ、位置コマンド生成器、およびサーボアンプで構成されています。シリンダを使用した標準的なリニア位置サーボシステムを下図に示します(いくつかの部品を適切な回転部品に変更することにより、回転位置サーボシステムとすることも可能です)。
バルブの2つの出力制御ポートは負荷シリンダの両端に接続されています。サーボアンプで、コマンド入力を位置トランスデューサの現在の位置出力と比較します。両者が一致しない場合、その差を増幅し、エラー信号としてバルブに供給します。この信号に応じてバルブのスプール位置が変化し、シリンダへの流量を調整して位置出力をコマンド入力に合わせます。
速度サーボシステム
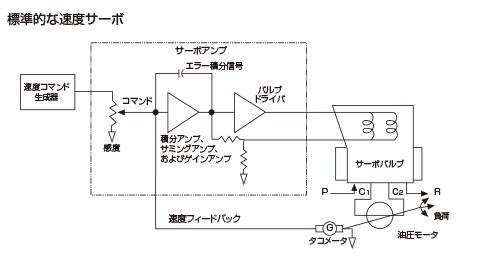
速度サーボシステムは、パイロット駆動または直動サーボバルブ、油圧モータ、タコメータ、速度コマンド生成器、およびサーボアンプで構成されています。なお、サーボアンプは、サミングアンプおよびゲインアンプを1つの積分アンプに統合することも可能です。標準的な回転速度サーボシステムを下図に示します(いくつかの部品を適切なリニア部品に変更することにより、リニア速度サーボシステムとすることも可能です)。
バルブの2つの出力制御ポートは油圧モータの両端に接続されています。サーボアンプで、コマンド入力をタコメータの現在の速度出力と比較します。両者が一致しない場合、その差を積分増幅し、その後エラー信号としてバルブに供給します。この信号に応じてバルブのスプール位置が変化し、モータへの流量を調整して速度出力をコマンド入力に合わせます。
力サーボシステム
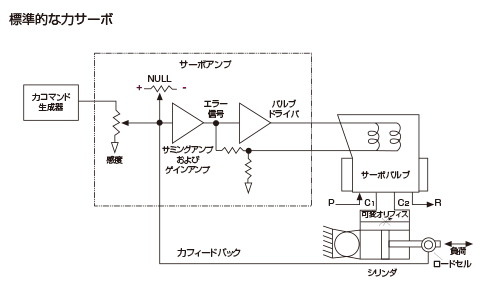
力サーボシステムは、パイロット駆動または直動サーボバルブ、アクチュエータ、ロードセルまたは圧力トランスデューサ、ならびにサーボアンプで構成することができます(可変オリフィス[AMO]を使用することにより、システムの性能をさらに向上させることが可能です)。標準的な力サーボシステムを下図に示します。
バルブの2つの出力制御ポートはシリンダの両端に接続されています。サーボアンプで、コマンド入力をロードセルの現在の力出力と比較します。両者が一致しない場合、その差を増幅し、エラー信号としてバルブに供給します。この信号に応じてバルブのスプール位置が変化し、アクチュエータへの圧力を調整して力出力をコマンド入力に合わせます。
お問い合わせはこちらへ
技術資料ダウンロード
以下のサーボ弁に関する技術資料(PDF)をご自由にダウンロードください。ご不明な点がありましたらメールまたはお電話でご連絡ください。