ムーグの超小型サーボ弁がイタリア技術研究所(IIT) 開発の新型4脚ロボットを制御
2015年1月12日
日本ムーグ株式会社
ムーグ社(Moog Inc.、本社:米ニューヨーク州イーストオーロラ、NYSEコード:MOG.A、MOG.B)は、イタリア ジェノバに拠点を置くイタリア技術研究所(IIT)の研究グループが新型4脚ロボットの脚の制御にムーグの超小型サーボ弁を採用したことを公表しました。HyQ(Hydraulically Actuated Quadruped:油圧駆動式4脚)と名付けられたこのロボットは、危険な場所での緊急事態への対応や捜索・救難活動を支援するために開発されました。
2007年に始まったこのプロジェクトは、バイオロボット工学の重要な技術革新であり、凹凸や障害物のある場所でも4本の脚で機敏に動き回ることができ、従来利用されてきた無限軌道ロボットの限界を超える多目的ロボットを開発するという野心的な目標を掲げています。イタリア技術研究所の先端ロボット工学部門でプロジェクトリーダーを務める技術者のClaudio Semini氏は、HyQに油圧技術を採用した理由として、電気機械式と比べて性能、出力、堅牢性に優れ、脚の制御性能を向上できることを挙げています。
HyQの開発を進めるうえで重要な要素の1つに、能動的に制御する脚の設計がありました。これは、超小型サーボ弁を使って作動油の流れを素早く変化させ、動作する脚の剛性と弾性を調節することにより、着地時の衝撃を吸収してロボット本体へのダメージを防止するというものです。ムーグが提供したE024シリーズ超小型サーボ弁は、元々、フォーミュラ・ワンのレーシングカー用に開発されたもので、わずか92gという超軽量構造と高い出力密度を兼ね備えています。
HyQロボットは、岩の多い路面上でのジャンプや、壁面がV字型に傾斜した細い通路での歩行が可能です。また、最大2m/sまでの速度で走行し、環境に応じて速度を調節できます。さらに、知覚システムと慣性測定ユニット(IMU)により、周辺環境の状況図に基づいて自らの動き方を決め、一歩一歩の動作をリアルタイムで修正することができます。HyQは、一度に4本の脚すべてを宙に浮かせる「跳躍走行」が可能な、世界でも数少ないロボットの1つです。
https://www.youtube.com/watch?v=ENHvCGrnr2gで、これらの動きを動画で紹介しています。
HyQは、現状で長さが約1メートル、重さが約80kgあります。駆動源は、現在は外付けですが、最終的にはロボット本体に直接搭載されます。
HyQに関する詳細は、https://www.iit.it/hyq をご覧ください。
イタリア技術研究所について
イタリア技術研究所(IIT)は、優れた基礎研究と応用研究を推進し、イタリアの経済発展を促進することを目的として、イタリアの教育大学研究省と経済財務省が共同で設立した民間の研究機関です。1,250名のスタッフが在籍し、その85%が研究に従事しています。IITはこれまでに約5,000点の刊行物を出版しています。また、140件の発明を生み出し、これに伴う特許出願は301件に上っています。
詳細については、www.iit.itをご覧ください。
HyQロボット
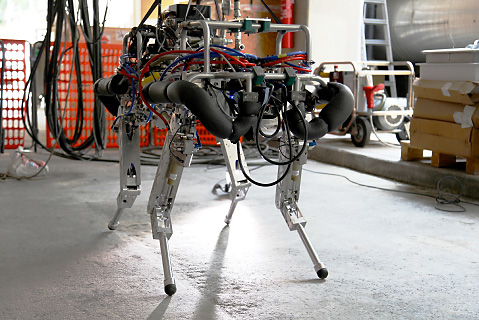
写真提供: Agnese Abrusci氏(IIT)
ムーグについて
1951年に設立されたMoog Inc.(本社:米国ニューヨーク州イーストオーロラ、ニューヨーク証券取引所上場:MOGA / MOGB、www.moog.com) は、精密制御機器/システムの設計、製造、構築を世界規模で展開する企業です。ムーグの高性能システムは、航空機、人工衛星、宇宙船、打ち上げロケット、一般産業用機械、風力発電機、蒸気・ガスタービン、鉄道車両、試験機、医療機器などの制御に利用されています。日本ムーグ株式会社は、Moog Inc.の完全子会社として1970年に設立され、Moog Inc. の機器とシステムの日本国内での開発、製造、流通、サービスを行っています。
詳細は、www.moog.co.jp をご参照ください。
【本件に関するメディアの方のお問い合わせ先】
日本ムーグ株式会社 マーケティンググループ
担当:ギャリー・インウッド(日本語でどうぞ)
〒231-0062 横浜市中区桜木町1-1-8 日石横浜ビル14階
TEL:045-680-2502 FAX:045-680-2509
Email:marketing.japan@moog.com
www.moog.co.jp
以上
米ムーグ社発表プレスリリースの抄訳です。