SmartMotor™ スマートモータ
機電一体型DCサーボモータといえば、Moog Animatics
<<Animatics製品は国内代理店様にて営業・技術サービスのご提供及び製品販売を致しております。詳細はこちら>>
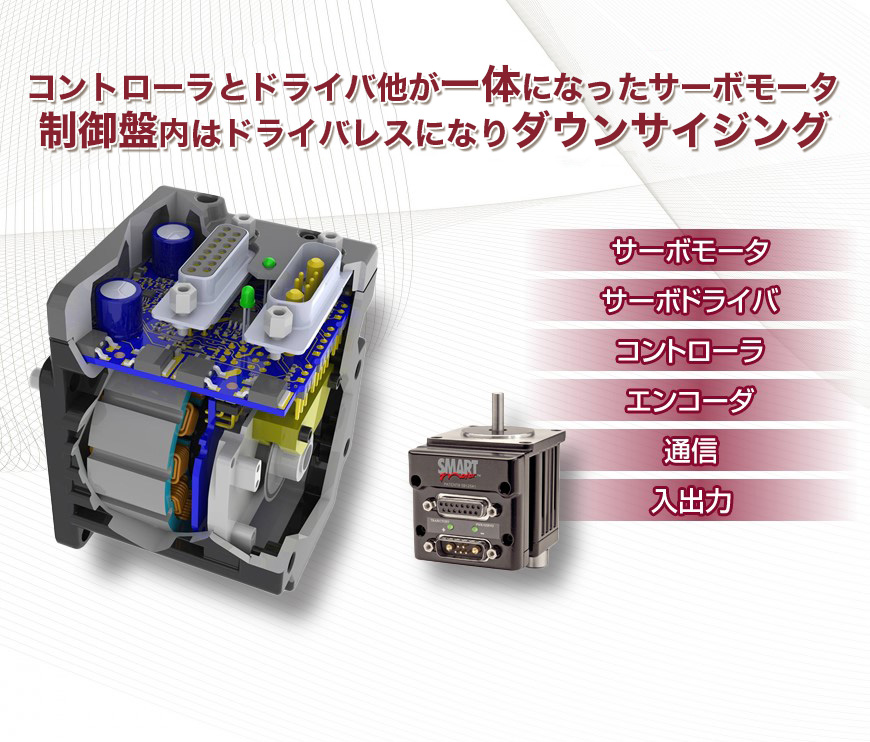

スマートモータ™とはコントローラ・ドライバ・エンコーダ・入出力・通信が一体型になったDCサーボモータです。制御盤のスペースと配線をコンパクトにできるので、省スペース・省配線を求められる用途に適しています。また、エンコーダケーブルがないためノイズの影響を防ぐことができます。Moog Animaticsは一体型DCサーボモータを開発したパイオニアでありマーケットリーダです。
<製品の特長>
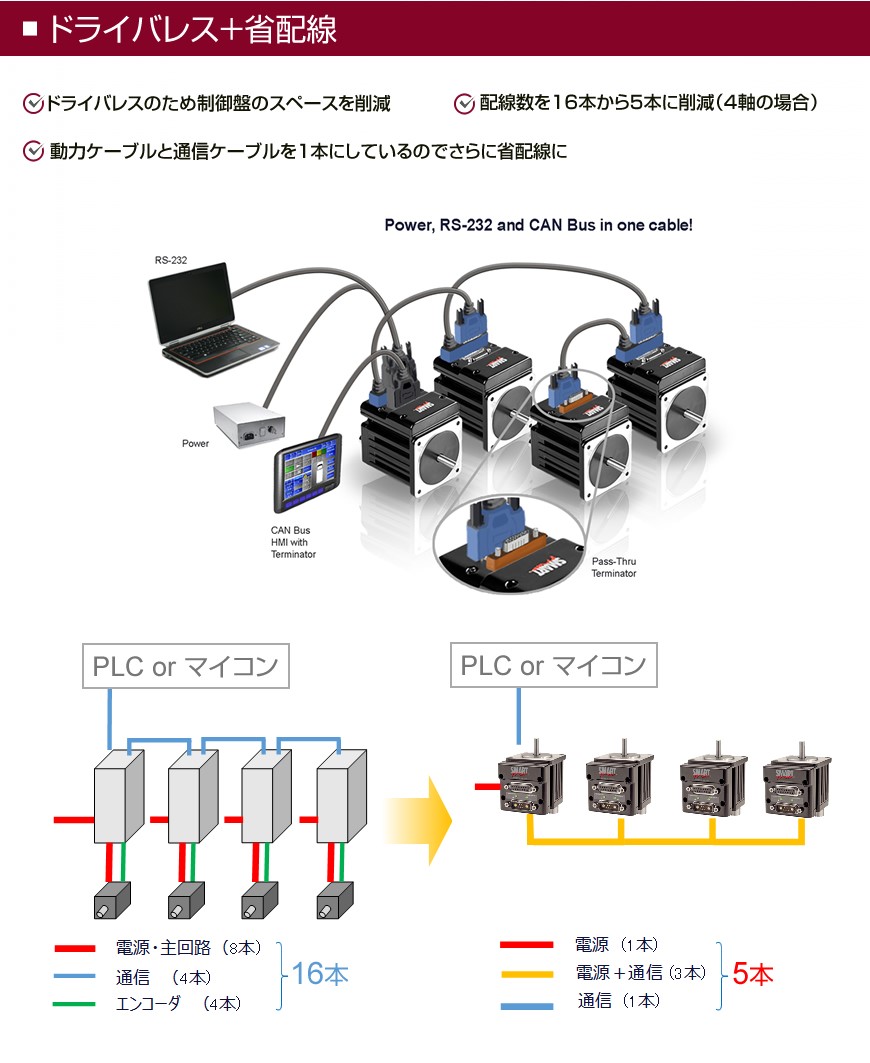
■省スペース・省配線だから制御盤を小さくできる
コントローラとドライバを内蔵しているため、設置スペースを考慮する必要がありません。
■ノイズ対策が容易(EMI/EMS)
アルミニウムの筐体でほぼ全て覆われているので外部への電磁波放射が極めて小さく、また外部からの電磁波に強い耐障害性の高い製品です。
■多軸制御もスマートモータだけでOK
別置きコントローラ(PLC)がなくても、モータ内のメモリにプログラムを書き込むことで自律制御と多軸制御ができます。
■多様な制御モードに対応
位置制御、速度制御、トルク制御、電子カム、電子ギヤ、パルス列入力制御、多軸補間制御、多軸協調制御(外部コントローラ要)に対応します。
■装置の見える化設定が可能
内蔵のコントローラで予知保全のプログラムを追加することができます。
■様々な通信プロトコールに対応
EtherCAT・CANopen・EtherNetIP・PROFINETなど各種通信にも対応します。
■様々な安全規格
CE、UL、CCCに対応しています。

【背景】
半導体製造装置の多くのプロセスではモーション制御を必要としています。コントローラ・ドライバ一体型設計のスマートモータは省スペース/省配線と柔軟に対応出来るコントローラ機能は装置設計者とって多くの可能性を提供しています。
例えば、デリケートなウェーハ上でシリコンウェーハを検査するために画像処理装置の移動、金属化/堆積プロセスでは真空チャンバに検査済みウェーハの搬送、最終製品のパッケージング、スタッキングにスマートモータは使用されています。
【課題】
大手半導体製造装置メーカは15年以上も古いモータシステムを使用し、デリケートなウェーハ上でシリコンウェーハを検査するために画像処理装置の移動、金属化/堆積プロセスでは真空チャンバに検査済みウェーハの搬送、最終製品のパッケージング、スタッキングにサーボモータを使用していました。
装置メーカはサーボモータの故障を未然に防ぐため、交換またはアップデートを検討していましたが、古いコントローラの仕様に合うサーボモータを探すことは容易でなく、ウェーハを継続して生産することが困難な状態になる可能性がありました。
一般的な分離型サーボモータシステム(モータ+ドライバ+コントローラ)に置き換えるためには、ホストシステムから送信されるコマンドプロトコルをモータ側のコントローラで理解する必要があります。しかし、モータ言語に対応させるために使用中のホストシステムを変更するという選択肢はユーザにありませんでした。
課題のポイント |
1. サーボモータを変更するためにホストコントローラを変えたくない。 |
| 2. ホストコントローラからRS485通信でコマンドを送信しサーボモータを制御したい。 |
| 3. ドライバ・コントローラスペースを新たに確保することなくサーボモータを使用したい。 |
【解決】
SmartMotor™はホストからASCIIコマンドを受信すると、コマンド文字列をデコードしモーションを開始することが可能です。ユーザは既存の分離型制御システムから一体型サーボモータシステムであるSmartMotor™にホスト側のコマンドプロトコルを変更せずに置き換えることが出来ました。加えて装置としての省スペース化とケーブル費用削減にも貢献しました。

解決のポイント |
| 1. ホストから送信されるASCII文字コマンド文字列で制御することが出来たので、古いサーボコントローラを置き換えることが出来た。 |
2. RS485通信を使用してバスネットワークを組むことが出来た。 |
3. 省スペース、省ケーブルを可能にした。 |


【背景】
監視カメラの製造メーカは雲台を含むシステム全体の簡素化が課題でした。既存のシステムは雲台のパンとチルト制御に2台のステッピングモータを使用し、これらのモータは別置きのドライバとコントローラを必要とする為、設置するスペースやケーブル数に問題を抱えていました。また、ステッピングモータは運転時に発生する大きな騒音や消費電力の問題があり、静粛性、省エネ、位置精度を満足するモータに変更する必要がありました。
映像では今までNTSCのアナログ信号のカメラを使用していましたが、鮮明なデジタル信号のカメラを使用する為、仕様に合うスリップリングを選択する必要がありました。
【課題】
システムの簡素化には雲台内部に必要とするコンポーネントを設置することが理想でした。しかし、一般的なステッピングモータやサーボモータでは別置きのコントローラとドライバを必要とする為、雲台内部に設置するには十分なスペースを確保できませんでした。また、雲台外部に制御盤を設置することは、課題を解決することにはなりません。加えて、コントローラとドライバを回転台の静止側に設置することはスリップリングに必要な極数が多くなるという点で避けたい選択肢でした。
課題のポイント |
1.コントローラ・ドライバの設置場所とスペース |
2.ケーブル数と必要とするスリップリングの極数 |
3.HD-SDI対応のスリップリングの調達 |
【解決】
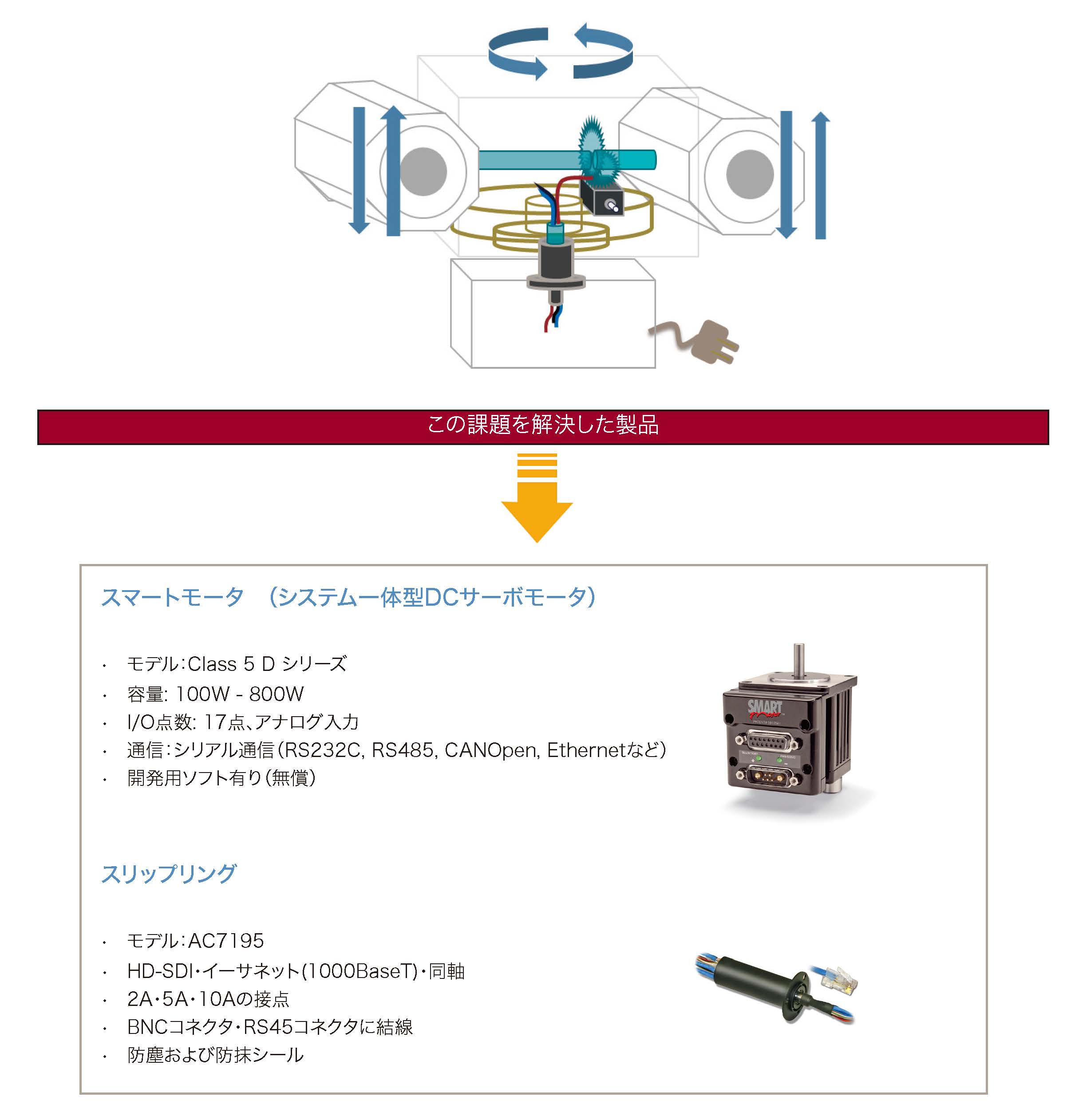
スマートモータはサーボモータにコントローラ・ドライバを搭載しているので、雲台内部に必要な全てのコンポーネントを設置することが可能です。制御盤を製作する必要がなくなることで、システムの簡素化とコスト削減を達成することを可能にしました。スマートモータは閉ループサーボモータなので、位置精度、静粛性、省エネ要求を満足しました。
Moog製スリップリングのAC7195はHD-SDI信号に対応しているので鮮明な映像を映すことができました。
解決のポイント |
1. 雲台内部に全てのモーション コンポーネントを設置することでコンパクトな設計 |
2. 制御盤レスによる省スペースとコスト削減 |
3. スマートモータの採用で静粛性、省電力、位置精度の向上 |
4. HD-SDI対応のスリップリングの採用 |

【背景】
スペースの限られたAGVの開発でコンパクトなサーボモータシステムを選択することは重要です。また、オムニホイールを使用して進行方向を自由自在に変更するようなAGVの開発では、各車輪の回転速度を制御出来るサーボモータは重要な構成部品です。
【課題】
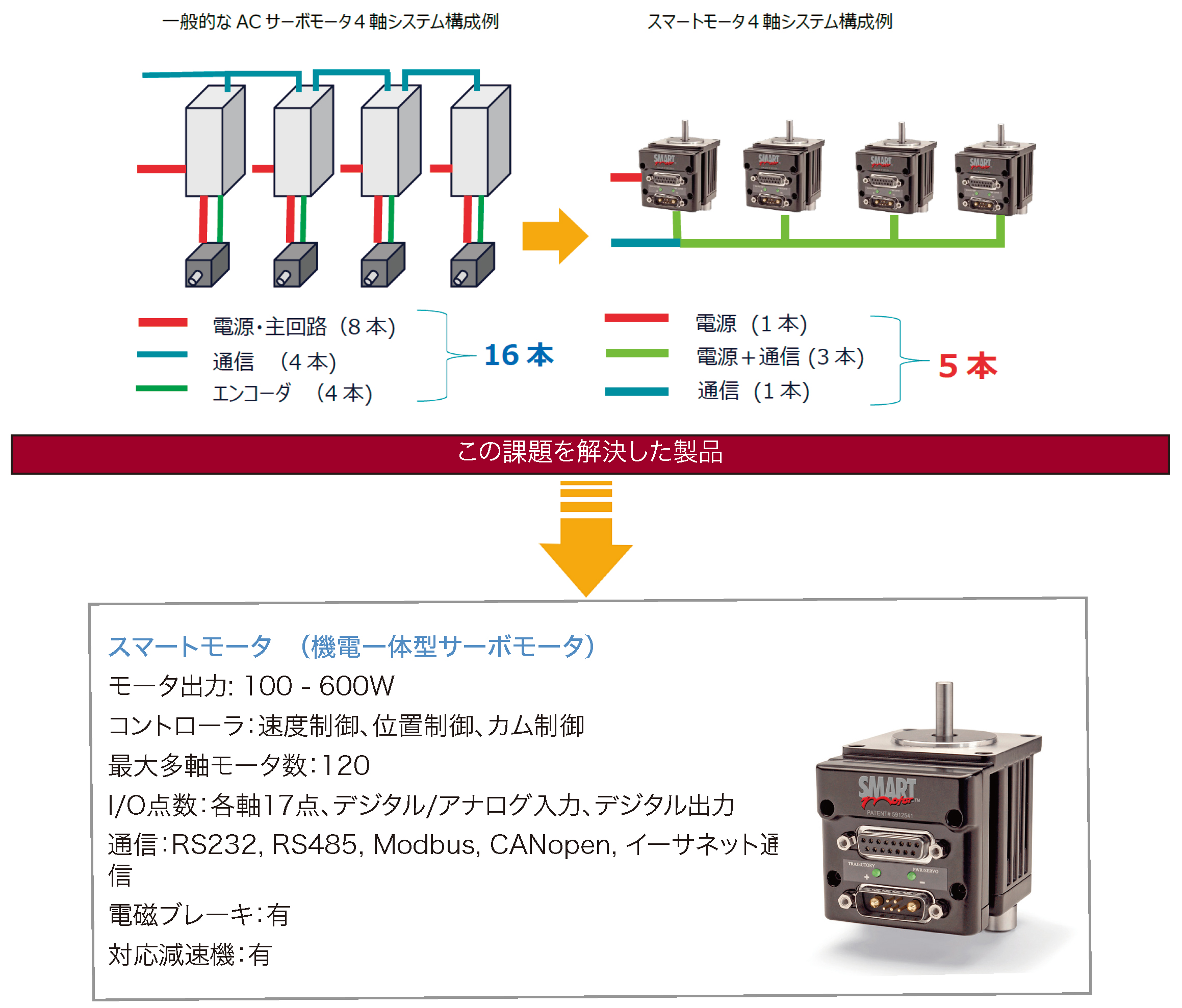
一般的なACサーボモータをAGVに採用する場合、別置きサーボドライバに大きなスペースを割く必要があります。特に各車輪の回転速度を制御することで進行方向を変更するAGVでは、サーボドライバの数も多くなり、コンパクトで低床なAGVを設計するには不向きなモータです。
多軸制御の場合、モータとドライバ間の配線数が非常に多くなり、組み立て時間やケーブルの配線ミスによるトラブルなど多くの問題を抱えることになります。また、一般的なAGVはバッテリー駆動の為、直流電源で駆動するモータが理想的です。
交流を駆動電源とするACサーボモータの場合、直流のバッテリー電源から交流に変換する必要があり、シンプルな方法ではありません。各ホイールの回転速度を制御するには、多軸サーボコントローラは重要なユニットです。
また、AGVの開発では、各モータ軸の速度制御だけではなく、磁気センサーや超音波センサー信号をコントローラに取り込むことを考慮に入れたコントローラの選択が必要です。
| 課題のポイント |
| 1.多軸制御の場合、サーボドライバの設置に大きなスペースがとられる |
| 2.一般的なACサーボモータでは配線数が多く、トラブルの原因となる |
| 3.直流電源で駆動するサーボモータが理想的 |
| 4.各ホイールの速度・位置制御を可能にするコントローラ |
| 5.センサー信号を取り込みモータ全軸が制御出来るコントローラ |
【解決】
MOOG製スマートモータはDCサーボモータ・コントローラ・ドライバが一体型となっているコンパクトなサーボモータシステムです。全てのサーボユニットが一体になっているため、別置きドライバとコントローラを必要とせず、コンパクトで低床なAGV設計を可能にしました。スマートモータの多軸制御では専用ケーブルを使用することで、配線数を大幅に削減出来ます。

スマートモータは直流電源(24VDC ~ 48 VDC)を使用して駆動・制御するので、サーボモータを制御するために直流から交流電源に変換する必要がなく、電気設計の簡素化と部品点数削減に貢献します。
スマートモータに搭載されている全てのコントローラはマスターコントローラとしての能力を備え、コントローラのメモリに制御プログラムを予め書き込むことで、自律制御を可能にします。各ホイールの速度等を変更するために、上位コントローラと連携する必要がある場合は、RS232, RS485, Modbus, CANopen, Ethernet通信等,多くの通信オプションを選択することが可能です。
各スマートモータは最大I/Oを17点使用出来るので、例えばセンサー信号をスマートモータに取り込むことで、各ホイールの回転速度を変更し、進行方向を変えることが可能です。
加えて、スマートモータのコントローラは、バッテリー残量や外的要因による駆動モータの異常を通知する機能を追加することが可能で、予防保全機能の追加はAGVの価値を上げることに大きく貢献しました。
| 解決のポイント |
| 1.別置きサーボドライバユニットを削減(省スペース) |
| 2.配線数を削減(省配線) |
| 3.スマートモータのコントローラで全軸の速度・位置制御が可能 |
| 4.スマートモータのコントローラにセンサー信号を読み込み、多軸制御が可能 |
| 5.スマートモータに搭載されているコントローラを使用して予防保全機能を追加 |
様々な保護等級、温度、通信プロトコルに対応しています。
詳細はシリーズ名のリンクからご確認いただけます。
| シリーズ名 | 特長 | 定格トルク(Nm) | 容量(W) | エンコーダ分解能 | 重量(kg) | モータ角 |
|---|---|---|---|---|---|---|
| Class 5 D Style | 標準 | 0.28 - 1.45 | 100 - 600 | 4000 - 8000(光学式) | 0.45 - 2.49 | NEMA23 (57.15mm) NEMA34 (86.36mm) |
| Class 5 M Style | IP67 | 0.52 / 1.42 | 200 / 400 | 4000 / 8000(光学式) | 0.68 / 2.72 | NEMA23 (57.15mm) NEMA34 (86.36mm) |
| Class 5 S Style | IP65 | 0.28 - 1.45 | 100 - 500 | 4000 - 8000(光学式) | 0.45 - 2.49 | NEMA23 (57.15mm) NEMA34 (86.36mm) |
| Class 5 LTR Style | 低温対応 | 0.19 / 0.25 | 115 / 135 | 4000 パルス (磁気式) |
0.27 / 0.59 | NEMA17 (41.9mm) NEMA23 (57.15mm) |
| Class 6M Style | Ethernet対応、IP67 | 0.48 - 1.34 | 60 - 460 | 4000 / 8000(光学式) | 0.77 - 3.40 | NEMA23 (57.15mm) NEMA34 (86.36mm) |
| Class 6D Style | Ethernet対応、アブソ式エンコーダ | 0.31 - 0.69 | 170 - 260 | 16384(バッテリーレスアブソリュート式) | N / A | NEMA23 (57.15mm) NEMA17 / 34 開発中 |